Carnegie Mellon University · RCHI Lab
Qihao (Keith) Lin 林祺皓
Hi! I am an M.S. student at Carnegie Mellon University working on assistive robotics. My research interests lie in robot perception and manipulation, machine learning, and human-robot interaction.

Research interests
Robot perception, manipulation, learning, and human-robot interaction.
Assistive robotics
Robot systems for caregiving and physical assistance, with an emphasis on robust interaction in real environments.
Visual-tactile perception and manipulation
Combining visual and tactile signals for transparent objects, deformable materials, and reconstruction tasks.
Machine learning for accessible interaction
Learning-based systems for sign-language translation, communication access, and human-centered interfaces.
I am an M.S. student at Carnegie Mellon University and a member of the Robotic Caregiving and Human Interaction Lab, advised by Zackory Erickson. I received my B.S. in Aerospace Engineering from Sun Yat-sen University, where I worked on robotic perception and manipulation with the Robotics and Intelligent Sensing Lab.
Selected work
Research projects
Selected work from assistive robotics, visual-tactile sensing, deformable object manipulation, and sign-language translation.
CMU RCHI Lab
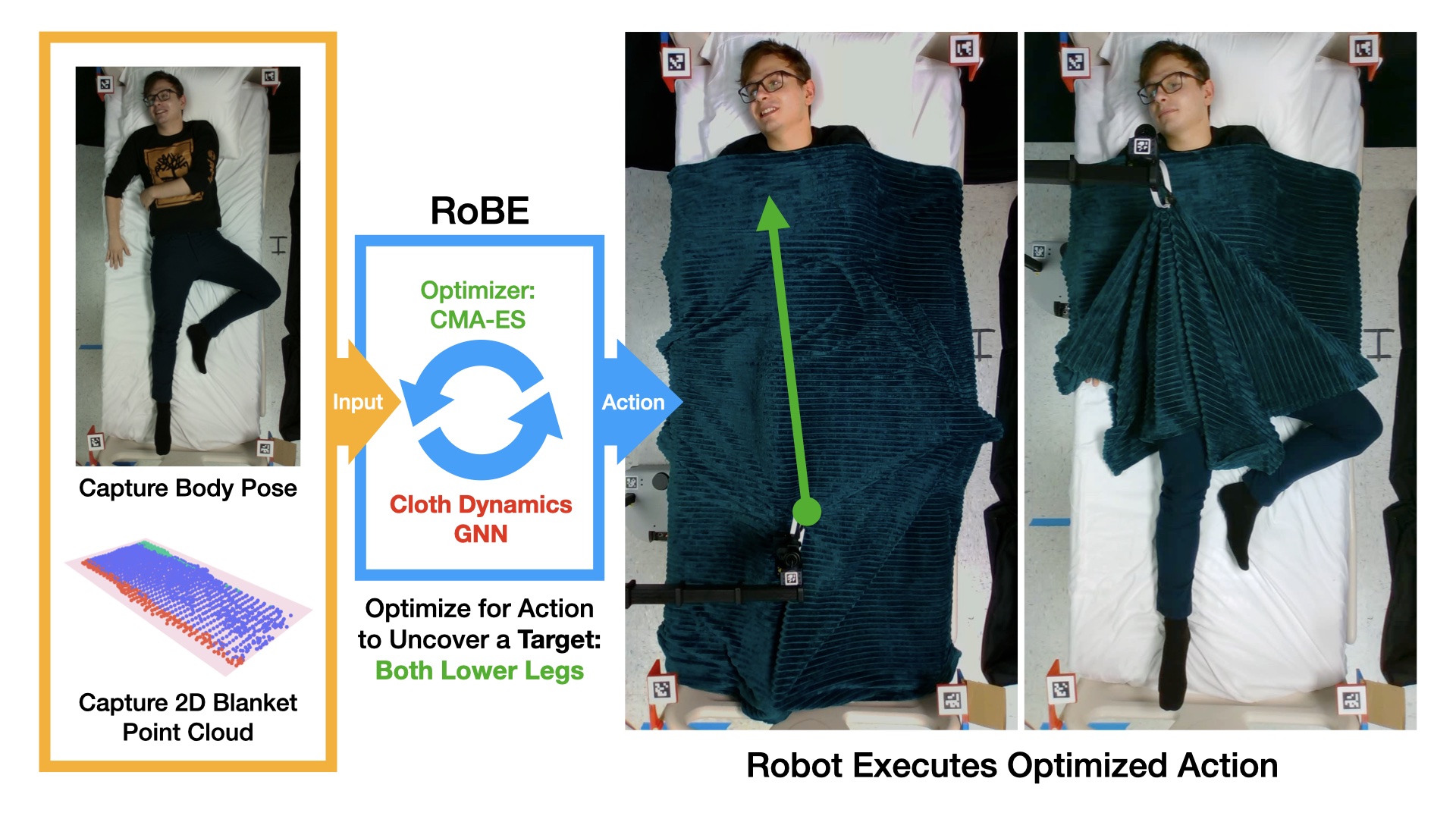
Assistive robotics for physical interaction
Assistive robot perception and manipulation in real physical environments.
Research at the Robotic Caregiving and Human Interaction Lab on assistive robotics, robot perception and manipulation, and human-robot interaction.
Visual-tactile perception
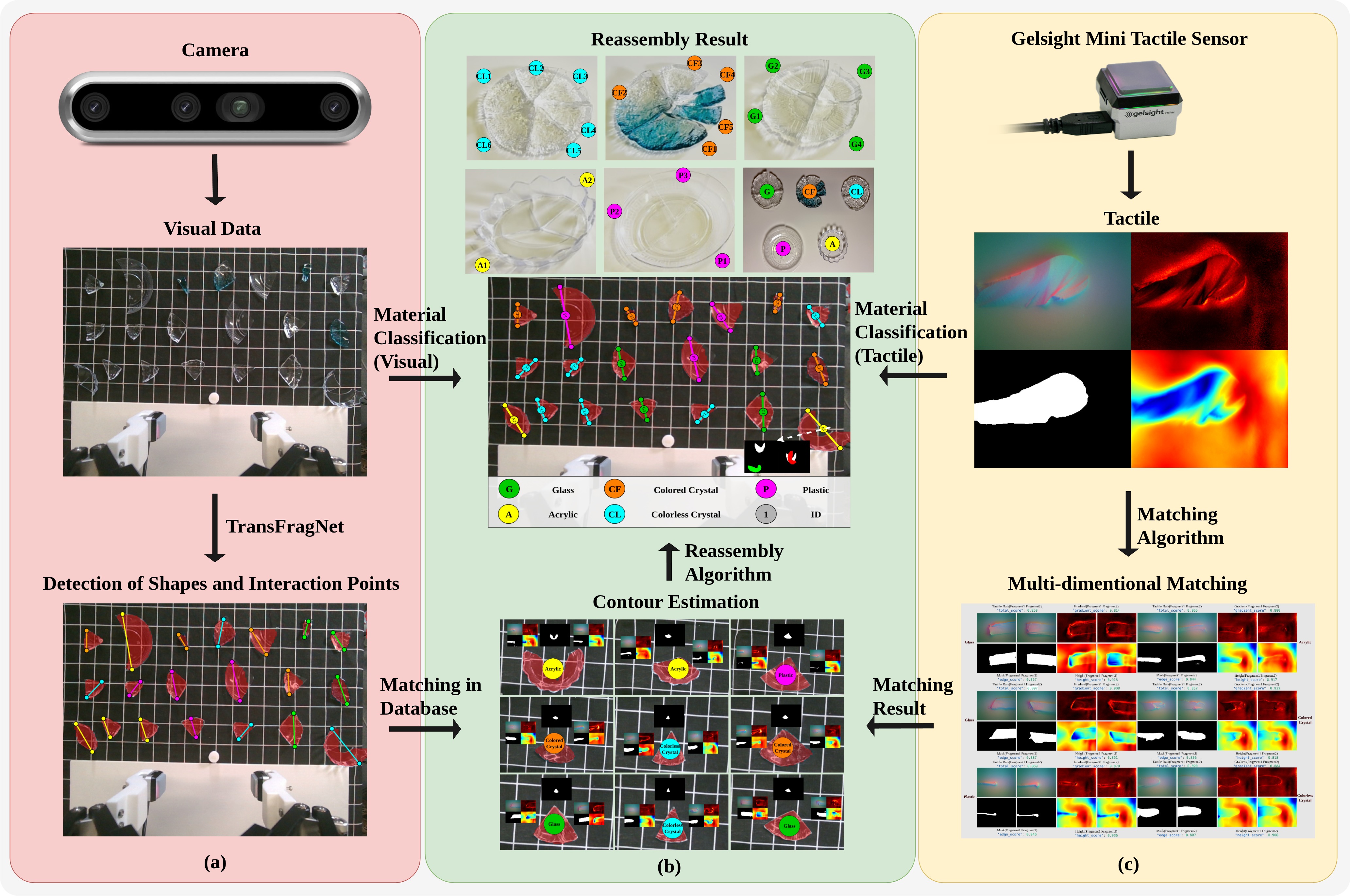
Transparent fragment reassembly
Visual-tactile fusion for transparent fragment contour estimation and reassembly.
A visual-tactile framework for transparent fragment contour estimation and autonomous reassembly, supported by TransFrag27K, GelSight tactile sensing, material classification, and contour matching.

Accessibility AI systems
Standardized-lexicon-scale Chinese Sign Language translation
Standardized-lexicon-scale Chinese Sign Language translation.
Industry work on a Chinese Sign Language translation system connecting a multimodal computational CSL dictionary, CSL-to-text recognition, text-to-CSL rule-assembled signer rendering, and edge-deployable local interaction. The public-facing scope is around 8,000 CSL vocabulary items.

Publications
Manuscripts and papers
Transparent Fragments Contour Estimation via Visual-Tactile Fusion for Autonomous Reassembly
Qihao Lin, Borui Chen, Yuping Zhou, Jianing Wu, Yulan Guo, Weishi Zheng, Chongkun Xia.
arXiv preprint, 2026
A dataset and benchmark for robotic cloth unfolding grasp selection: The ICRA 2024 Cloth Competition
Victor-Louis De Gusseme, Thomas Lips, Remko Proesmans, et al., Qihao Lin, et al.
The International Journal of Robotics Research, 2025
Contact